
Nikolaj Hindsbo
AI Engineer at Armada.
edge deployment, multimodal and agentic systems, memory layers and continual learning, time-series forecasting.
Selected work.

SCOPE
When you chain a language model and a vision model together, how do you know which one failed? SCOPE is an evaluation harness for modular multimodal pipelines, built around PTZ camera control as the test domain. Published at HRI '26.
- Python
- Blender
- Qwen3
- Moondream
- vLLM
- LLM-as-Judge
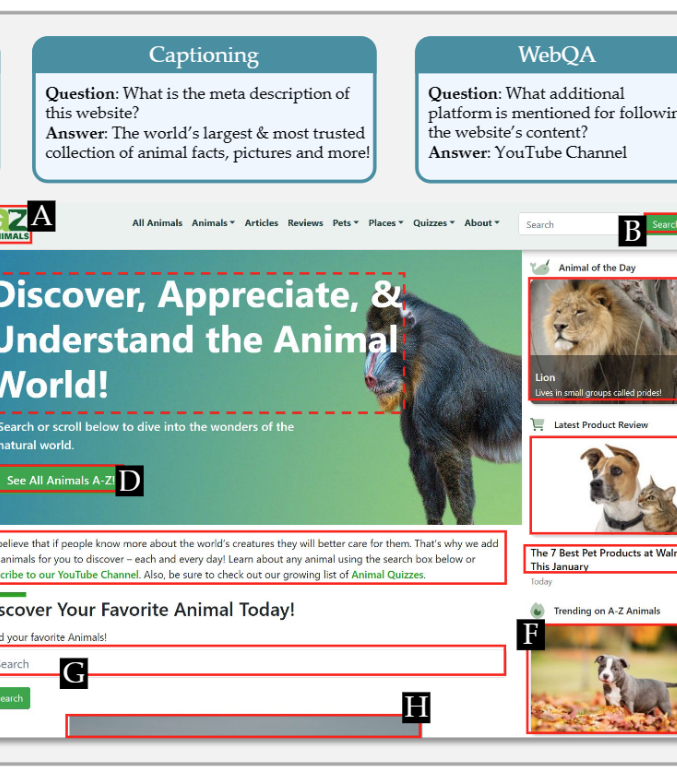
Fine-tuning LLaVA for Web Agents
Group project at CMU. We took LLaVA-v1.5-7B, fine-tuned it on a web-UI dataset, and pushed the open-model score on VisualWebBench up.
- LLaVA
- LoRA
- PyTorch
- VisualWebBench
- MultiUI
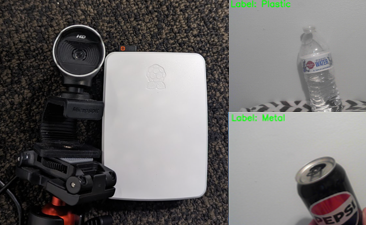
Waste Classification on a Raspberry Pi 5
Vision classifier squeezed onto a Pi 5 to run offline. The constraints ended up being more interesting than the model.
- ONNX
- Raspberry Pi 5
- OpenCV
- INT8 quantization
- TrashNet

Directional Buckling for In-Pipe Locomotion
Soft-robotics work at CMU. Designed a compliant leg that buckles in a known direction so a small robot can walk through narrow pipes.
- ANSYS
- Silicone elastomer
- 3D printing
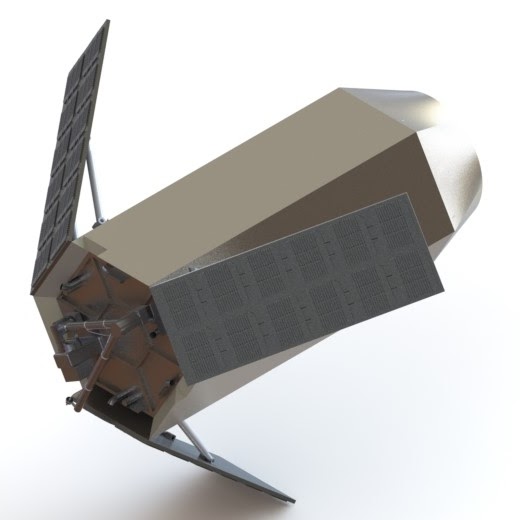
Refueling Satellite
Senior design capstone at UW. Designed and analyzed a concept for refueling satellites in low-earth orbit, before they become space debris.
- SolidWorks
- ANSYS
- MATLAB
- Orbital mechanics
Notes & talks.
Coming soon.
Say hi.
Best way to reach me is LinkedIn.
If you message me, mention you came from this site, it makes you way easier to spot in the inbox.